


Sign in
New customer? Start here
Cancel
CEFIKEFG

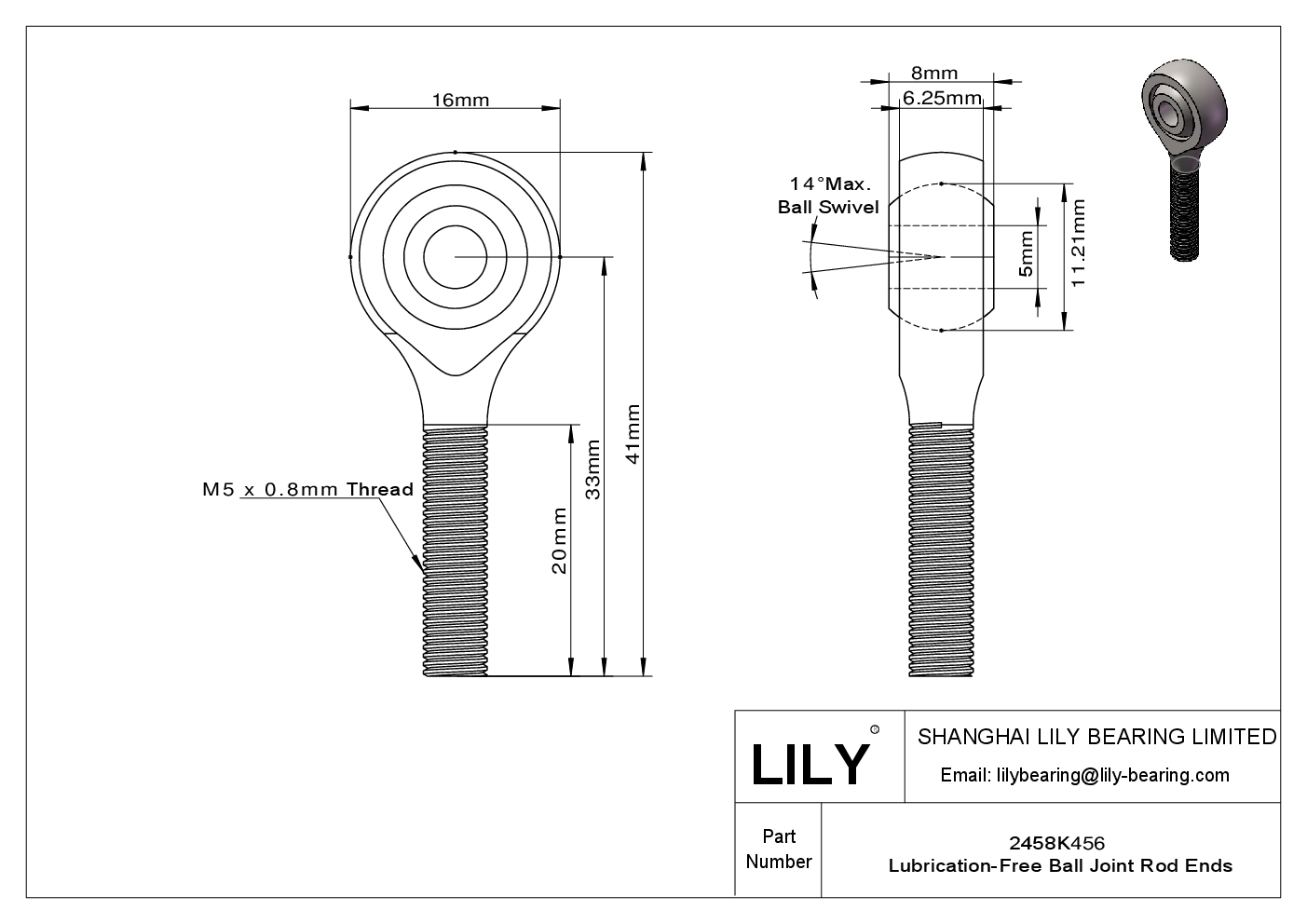
| Part Number | CEFIKEFG |
| System of Measurement | Metric |
| Type | Male |
| Rod End Type | Ball Joint |
| Shank Threading | Fully Threaded |
| Bore Dia | 5 mm |
| Bore Dia Tolerance | -0.012mm to 0.065mm |
| Width Inner Ring | 8 mm |
| Angle Of Tilt | 14° |
| Thread | M5 × 0.8 mm |
| Thread Direction | Right Hand/Left Hand |
| Diameter Head | 16 mm |
| Height Shank End Face | 33 mm |
| Length Threat | 20 mm |
| Static Radial Load | 2800 lbf |
| Material | Zinc-Plated Alloy Steel |
| Ball Material | Chrome Plated Bearing Steel |
| Lubricant | Not Required |
| RoHS | Compliant |
| REACH | Compliant |
INTERCHANGE
The LILY Bearing part series CEFIKEFG is a potential replacement for these common bearing part numbers.
LILY
MCMASTER
CEFIKEFG
2458K456
Design Features of CEFIKEFG Bearing
CEFIKEFG Bearing features a smooth-motion spherical bearing, strong housing, and an easy-to-connect external thread. It is made from durable stainless or alloy steel, and it often includes seals to block contaminants and retain lubrication, ensuring long-lasting performance. CEFIKEFG bore dia is 5 mm. Its diameter head is 16 mm. CEFIKEFG width inner ring is 8 mm. It is designed to allow smooth rotational and oscillating movements while handling misalignment.
What Benefits Can CEFIKEFG Bearing Provide?
- Flexibility: It allows for angular movement and misalignment, accommodating dynamic loads and movements.
- Durability: It is made from robust materials, ensuring long service life even in harsh conditions.
- Ease of Installation: The design simplifies installation and adjustment.
- Versatility: The bearing is suitable for a wide range of applications.
What Can CEFIKEFG Bearing Be Used for?
- Industrial Machinery: It can be used in linkages, control arms, and moving parts.
- Automotive: Common in suspension systems and steering linkages.
- Aerospace: It is utilized in control linkages and landing gear mechanisms.
- Agriculture: The bearing is employed in various equipment requiring durable, flexible joints.
- Robotics: Essential for precise movements in robotic arms and joints.




