Sign in
New customer? Start here
Cancel
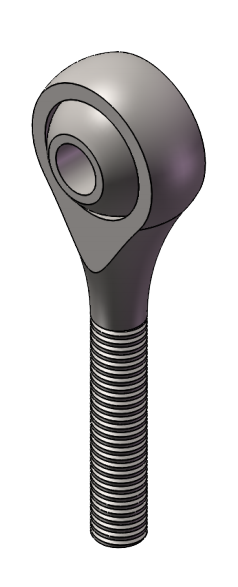
FJJDFKEE

| Part Number | FJJDFKEE |
| System of Measurement | Metric |
| Type | Male |
| Rod End Type | Ball Joint |
| Shank Threading | Fully Threaded |
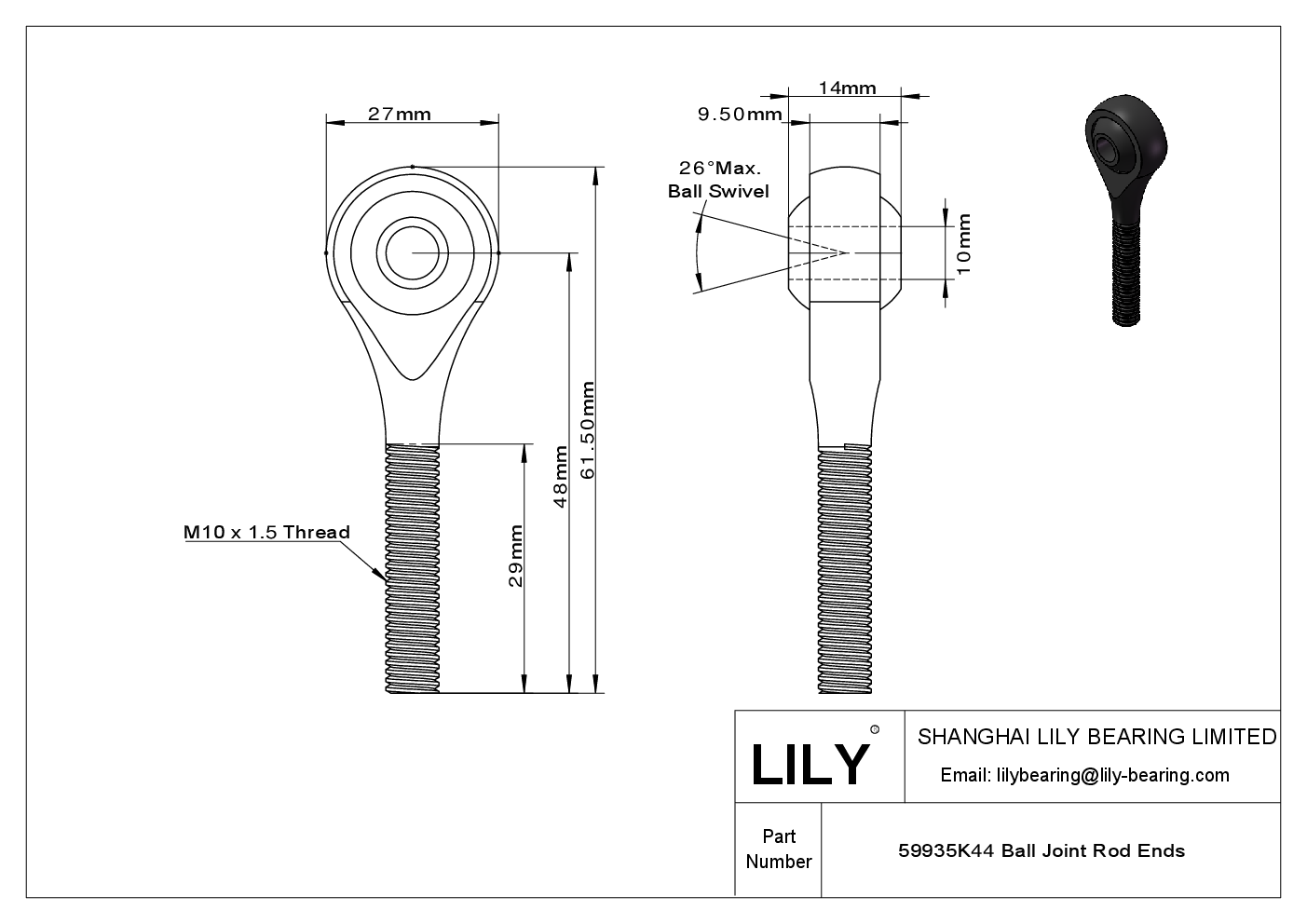
| Bore Dia | 10 mm |
| Bore Dia Tolerance | -0.013mm to 0.065mm |
| Width Inner Ring | 14 mm |
| Angle Of Tilt | 26° |
| Thread | M10 × 1.5 mm |
| Thread Direction | Right Hand/Left Hand |
| Diameter Head | 27 mm |
| Height Shank End Face | 48 mm |
| Length Threat | 29 mm |
| Static Radial Load | 4700 lbf |
| Material | Zinc-Plated Carbon Steel |
| Ball Material | Alloy Steel |
| Lubricant | Required |
| RoHS | Compliant |
| REACH | Compliant |
INTERCHANGE
The LILY Bearing part series FJJDFKEE is a potential replacement for these common bearing part numbers.
LILY
MCMASTER
FJJDFKEE
59935K44
Design Features of FJJDFKEE Bearing
FJJDFKEE Bearing features a smooth-motion spherical bearing, strong housing, and an easy-to-connect external thread. It is made from durable stainless or alloy steel, and it often includes seals to block contaminants and retain lubrication, ensuring long-lasting performance. FJJDFKEE bore dia is 10 mm. Its diameter head is 27 mm. FJJDFKEE width inner ring is 14 mm. It is designed to allow smooth rotational and oscillating movements while handling misalignment.
What Benefits Can FJJDFKEE Bearing Provide?
- Flexibility: It allows for angular movement and misalignment, accommodating dynamic loads and movements.
- Durability: It is made from robust materials, ensuring long service life even in harsh conditions.
- Ease of Installation: The design simplifies installation and adjustment.
- Versatility: The bearing is suitable for a wide range of applications.
What Can FJJDFKEE Bearing Be Used for?
- Industrial Machinery: It can be used in linkages, control arms, and moving parts.
- Automotive: Common in suspension systems and steering linkages.
- Aerospace: It is utilized in control linkages and landing gear mechanisms.
- Agriculture: The bearing is employed in various equipment requiring durable, flexible joints.
- Robotics: Essential for precise movements in robotic arms and joints.